27MHz remote control system
This is a niche product intended for radio control (RC) of the somewhat larger model submarines, which are equipped with a device to control buoyancy, need be able to navigate deep underwater (3-5 metres) and in addition to servos also require switching functions (on/off).
It consists of a receiver and a transmitter PCB. Hard- and software are derivatives of the research PCB (see elsewhere on this website). Various ballast systems are supported, including piston tanks.
From October 2024, a prototype system, based on the AX5043 transceiver IC, is being tested by David Forrest (UK). The video shows my 30-year-old overhauled model submarine equipped with the 27MHz remote control system.
Recently, 10 sets of transmitter and receiver PCBs were delivered and successfully tested.
Upon request a product manual is available here (please specify your ballast system).


Receiver
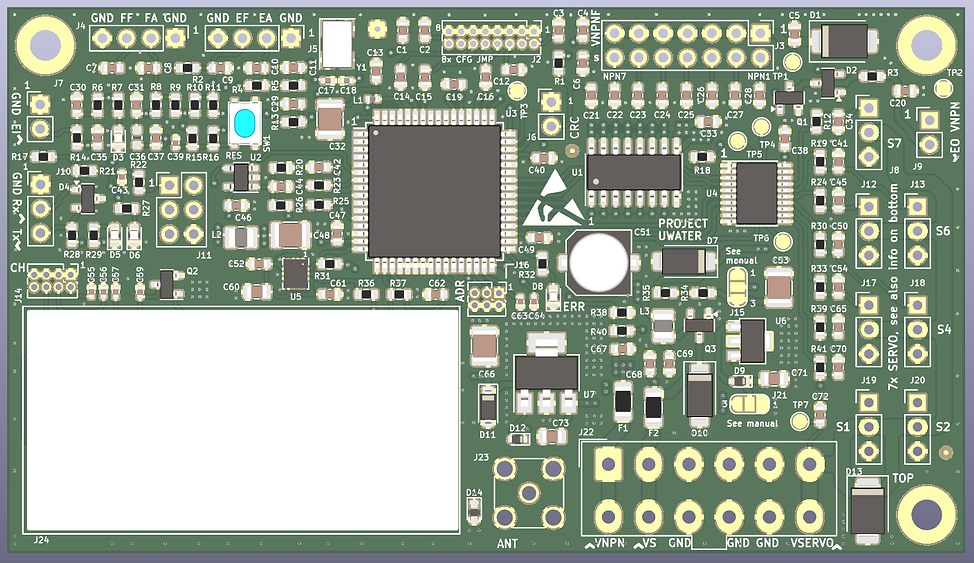
There are two types receiver PCBs. One equiped with the AX5043 transceiver IC and one with the Radiometrix LMR0 module. The latter is shown in the image above.
In terms of functionality and dimensions, there is no difference between a receiver with the AX5043 or the LMR0 module.
The receiver provides 7 digital outputs (ULN2003) and 7 proportional pulse outputs (servo control signals).
Actually the receiver is more like a controller. All kinds of signals are connected to it, pass through it or are processed by it. It is like a spider in a web. Several built-in autonomous safeguards help to keep the vessel within safe operating conditions.
Production data for a small DIY antenna impedance matching PCB is available for download. The antenna is a shortened wire dipole antenna. It is intended for mounting inside/against the plastic hull material of the WTC.
By default, the receiver PCB supports piston tanks. However, when programmed with different software, the receiver PCB can also support some ballast systems based on pumps and valves (see overview ballast systems, yellow section).
A (rechargeable) battery of 6 to 12VDC can be used as supply voltage (VS).
The image below shows the receiver PCB installed in a model submarine equipped with piston tanks.
57x100mm

Transmitter

The transmitter provides 7 digital and 7 analogue inputs. The digital inputs are on/off signals and the analogue inputs servo control signals.
The transmitter PCB supports the AX5043 as well as the Radiometrix LMT0 transmitter module. The latter is mounted on the back of the PCB.
Production data for a small DIY antenna impedance matching PCB is available for download. The antenna is a shortened telescopic antenna.
The transmitter PCB has a PPM input, among other things. This allows the use of joysticks and built-in features of modern, commercially available, RC transmitters. This function requires a PPM output on the commercially available RC transmitter (trainer port).
Supply voltage: 6-15VDC (battery or regulated)
The image below shows the transmitter PCB mounted on the outside of a Robbe/Futaba F-14 remote control.

75x95mm
